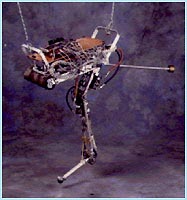
Herbir eklemi hidrolik eyleyiciler tarafından denetlenen UNIROO 6.6 kg ağırlığında bir kangrunun kinematik açıdan modelidir.UNIROO'nun en önemli özelliği simetrik olmamasıdır. Bacak kalçaya ağırlık merkezinden bağlanmadığından robot simetrik olmayan bir yapıya sahiptir. Buna rağmen UNIROO üzerinde yapılan testler simetrik yapıya sahip olmayan bacaklı robotların dengesinin denetlenmesinin mümkün olduğunu göstermiştir.
UNIROO (MIT Leg Lab.)