





Vanderbilt Üniversitesi'nde böcek benzeri, sürünen ve uçan robotlar üzerinde çalışılmaktadır. Robotlardaki, sürünme ve uçma fonksiyonlarının piezoelektrik eyleyicilerle yapılması planlanmaktadır.
MFI projesi
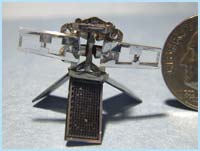
Mikro mekanik uçan böcek (MFI) projesi, Berkeley Üniversitesi'nde başlamıştır. Tasarım sırasında, bir et sineğinden faydalanılmıştır. MFI'nin kanat uçları arası 25 mm'dir. Güvenli bir özerk uçuşu sağlayacak şekilde tasarlanmış, ve gerçek sineklerdeki olağanüstü uçuş performansını yakalayabilmek amacıyla biomimetik kuralları kullanılarak geliştirilmiştir. Gerçek sineklerin yüksek performansı, düzgün olmayan aerodniamik yapı sayesinde oluşan güçten, yüksek motor-ağırlık oranlı motor sistemi, ve entegre görsel ve dinamik algılayıcıların yüksek hızlı kontrol sistemi kullanılarak elde edilmektedir. Yapılan ön çalışmalar, piezoelektrik eyleyiciler ve esnek toraks yapının, gereken güç yoğunluğunu ve kanat zarfını sağlayabileceğini göstermektedir. Gereken yeterli güç ise, solar hücrelerle doldurulan lityum pillerle sağlanabilmektedir. Toraks yapı, küçük piezo eyleyicilerin sapmalarını, yüksek kanat zarfı ve rotasyonuna çevirebilmekte, bu da efektif uçuşun başarılmasını sağlamaktadır.